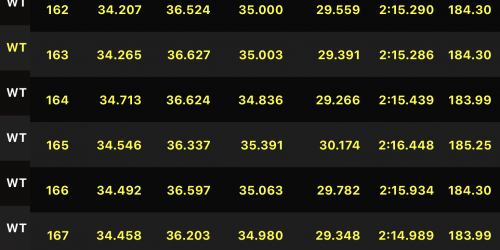
ラップタイマーあれこれ その8 実践編☆
さて、3つになったラップタイマーを取り付けて先日筑波で試してきました。あいにくの雨模様、タイヤはブリヂストンR11のもう終わりかけ。こんなんで雨の中走るのか?? でもデータ取りたいなと思ってスローペースで走ってきました。これまでのいきさつは下記の通りです。
で、結果から言うと細かい課題はありつつもどれもいい感じで動いてくれました。1台のバイクに3つもラップタイマー付けるって普通やらないですが、今回はM5StackベースのGPS専用機をメーターの近く、これまで使ってきたGL-770とスマホはアクセルの近く、そして自作GPSデバイスとスマホ(RaceChrono)はシート下に設置。

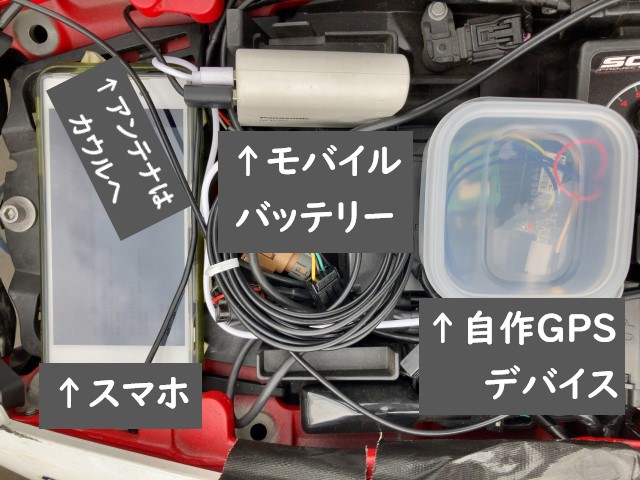
GPS専用機と自作GPSは外部アンテナなので、それぞれフロントカウル、リヤカウルにぺたっと貼り付け。
で、結果としてはだいたいどれも同じような感じ。GPSベースのラップタイマーなのでどうしても誤差はあるため、どのラップ情報が正しいかとかいう話はあまり参考にならないと思います。が、走行振り返りにより役立ちそうなのはどれかという意味でGPSの軌跡の比較をしてみたいと思います。
GPSログデータを入力するとそれをGoogleマップ上にトレースしてくれるサービスっていろいろありますが、そのようなサービスに3つのログデータを投入。するとちょっとした傾向が見えてきます。この日はアジアコーナーあたりに陣取っていて、そこからコースインするライン、そして一度ピットに戻ったのでアウトラップが2本見えています。
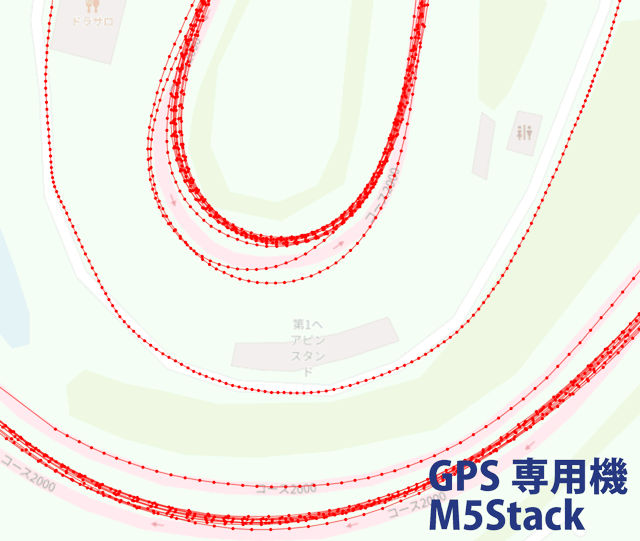
どうでもいいけど、この地図って結構再現してくれてるんですね。ドラサロやトイレまで描いてあるし、「ドラサロ」って通称で描いてあるしw
さて今回使った3つはそれぞれGPSモジュールが異なります。
- GL-770 : Qualcomm SiRF star V 5e
- 自作GPS機器 : 太陽誘電 GYSFDMAXB
- M5StackのGPS : u-blox NEO-M8N
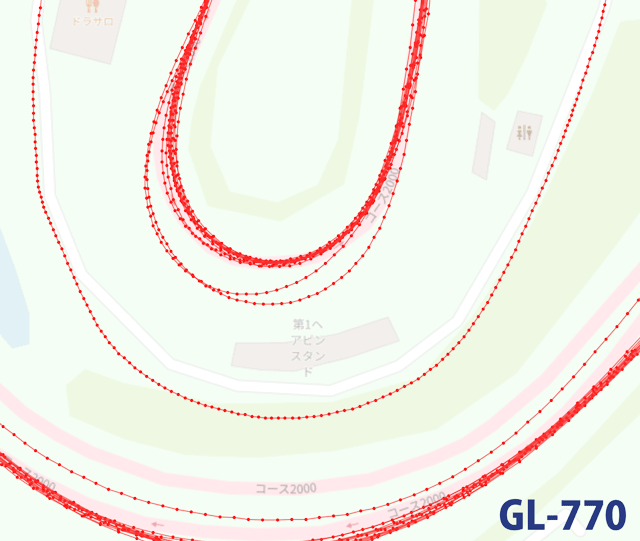
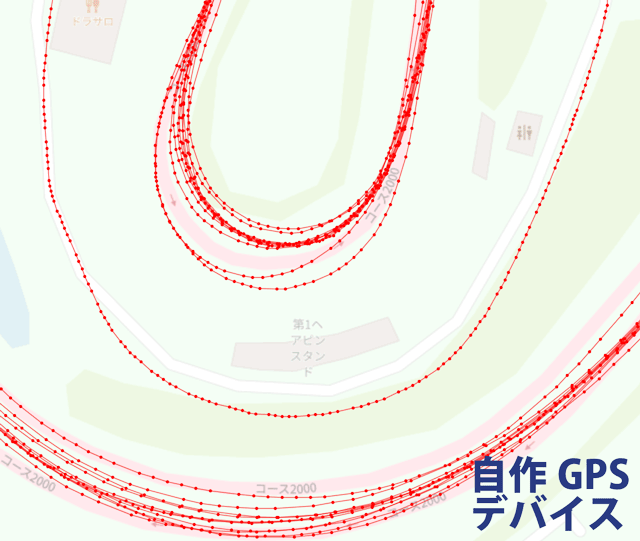
で、どれも受信しやすいところに設置したのでGPS信号の感度という意味では有利不利はない状況。で、下記のトレースを見ると一番安定していて、かつ精度もいいのがM5Stack(u-blox NEO-M8N)、で、わずかに劣る?でもほとんど同レベルでGL-770(Qualcomm SiRF star V 5e)、で、比較的安定性が劣るのが自作GPS(太陽誘電 GYSFDMAXB)という結果でした。総じてどれもいいレベルなんですが、3つを比べるとこんなかんじかなと。自作GPS(太陽誘電)のは位置情報は結構いい感じなんですが、安定しないんですよね。最終ラインが毎周回かなり違うラインを通っているように見えますが、実際はそんなことなくて(多分w)、他のデバイスでの軌跡はまとまった束になって見えます。他のコーナーでも同じような傾向があったので、これだと「自分のラインってどの程度安定してるんだろう?」という振り返りには正直使いづらい。またピットインしたときの軌跡が最終コーナーの軌跡とかぶってどれがインラップ軌跡か分からないくらい。
GL-770とM5Stackの場合、基本的に同じようなラインをトレースしてくれています。インラップの軌跡も正確。お互いの絶対位置がずれてますが(平行移動させるといい感じに重なりそう)、どっちがずれているかは正直分かりません(今回のデータを見る限りではM5Stackのほうが下の地図と結構あってそうですが、そもそも地図自体がどこまで忠実に描かれてるのかという問題もあり)。いずれにせよ毎回のラインはGL-770でもM5Stackでも正確なので振り返りに十分役に立ちそう。
GPSモジュールの世界は全然詳しくないですが、u-bloxって定期的に新バージョンをリリースしているようで、M8の前にはM7とかM6があって、割とまめに更新し続けている模様。M8はどうも2018年頃にリリースされたっぽいのですが(データシートのLegal Noticeより)、主観ですがこういうのって新しい機器の方が基本的には性能良くなってると思うので、そういうのもあって一番精度がいいのかなと思いました。
太陽誘電のも決して古くは無いんですが(みちびきという新しい衛星にも対応しているので)、結果的にこういう結果となりました。まー私の自作レベルなのでそれが原因というのもあるかもしれませんが、こういうデジタル機器のなかで「作り方が良くないのでデジタル値が少しだけずれる」というのも考えにくいなあ(あるとすれば全くデータが取れないとか、データが途切れるとか)。
あと自作GPSデバイスの場合、データが定期的に抜けてる(●が1~2秒ごとに欠けてる)んですが、これがどこから来ているのかまだ調査中です。欠けてても走行解析には大きな影響はないんですが、単に気持ち悪いというか、引き続き追っていこうと思います。
ところで、秋月電子のサイトをいろいろ見てみると、外部アンテナタイプでかつGPSモジュールがアンテナの中に入っているタイプ、そして今回結果良好だったu-blox M8と同じエンジンが使われているというものを発見! 早速購入して作ってみたのがこちら。基板が1つで済むので(GPSモジュールはアンテナの中に入っているので)、とても小さくて済みます!配線もすっきりするし、これでどういう結果になるか今度試してみたいと思います。

GPS精度ってもっと上げられないの??
さらにGPSデータの精度を上げたい!! ライン1本分の違いも分かるようになりたい! というときどうするか? 今だと農機にGPS付けて自動で農作業をやってくれるようなことも出来るそうですが、今回のような精度だと無理っぽい。そこでGPSの信号を補完するために基準局というのを立てて、衛星+基準局でがちっと精度を上げていくそうです。RTKとも言いますが、これだと1cmの精度で分かるらしい。すご。
でもその基準局ってどうやって使うの? お高いんでしょう?? そうなんです。誰でも使える基準局もあるにはありますが、そんなにないので自分で立てることになりますが、機器も必要だし手間もかかります。まーGPSラップタイマーに何を求めるかですが、1cm単位でのラインの違いが分かったところでどれほどタイム上がるの???という本題に立ち返ると、まずはこのレベルの誤差でも十分許容できるのではないでしょうか。ラップタイムもGPSベースだとどうしてもズレます。正確なラップタイムが知りたい方は、ポンダー貸し出しサービス使うべきと思います。これなら1日1,000円程度で利用可能です☆